




背景意义
近些年来,由于我国全国范围内大量开采和使用煤炭资源,造成一些区域供不应求。如何有效的开采矿产资源以及合理的利用煤炭资源是我们目前所关注的主要问题。
本项目根据对矿山地下巷道详细研究分析,通过利用SLAM移动手持三维激光扫描仪对矿山内部巷道进行实地扫描,进而对扫描数据进行分析计算和逆向建模。
技术优势
体积小,重量轻,仅重3.5kg ,手持式 GEO-REVO 可在多种复杂环境下快速部署并进行工作。
无需 GPS 与繁琐操控,一键式运行,大大降低对操作人员专业性的要求。
单人作业,无需传统测量方式两人一组,费时费力。
改变传统测量方式,采集所有现场数据,使数据成果有可追溯性。
采集数据,可生成多样化成果,一次采集,可适用于多次分析。
测量精度高,数据更准确,将现场搬回办公室,对任意位置进行量测。
质检更方便,原始数据进行留存,随时作为检验依据。
方案优势
使用最新的便携式可移动三维测量仪,利用其本身重量轻,体积小、便于携带和无需GPS信号的特点,可对地下矿山进行全面的快速测量,包括巷道、竖井、采场、空区等。通过测量,获取矿山地下空间实测数据,如对某地下矿区东西长1300m,南北600m,深240m矿区进行数据采集。通过打开SLAM设备让其沿着巷道进行作业便可实现对巷道的三维数据采集,在采集过程中设备内部采用SLAM算法,可以实现数据的实时自动拼接和处理,大大减少内业处理流程。
施工细节
通过对整体作业环境的视察,规划出合理的扫描路线,作业人员通过手持GEO-SLAM移动式扫描仪对矿山下地巷道进行行走作业,只要人可以正常通过的地方,都可以采集到对应的三维数据,并且在一些人无法到达的特殊地况,可以通过架接加长杆进行探测扫描,在原本狭窄不便的地下矿区,SLAM不但没有受到环境的限制,利用其灵活多样作业模式,在地下矿区大展拳脚。

软件处理
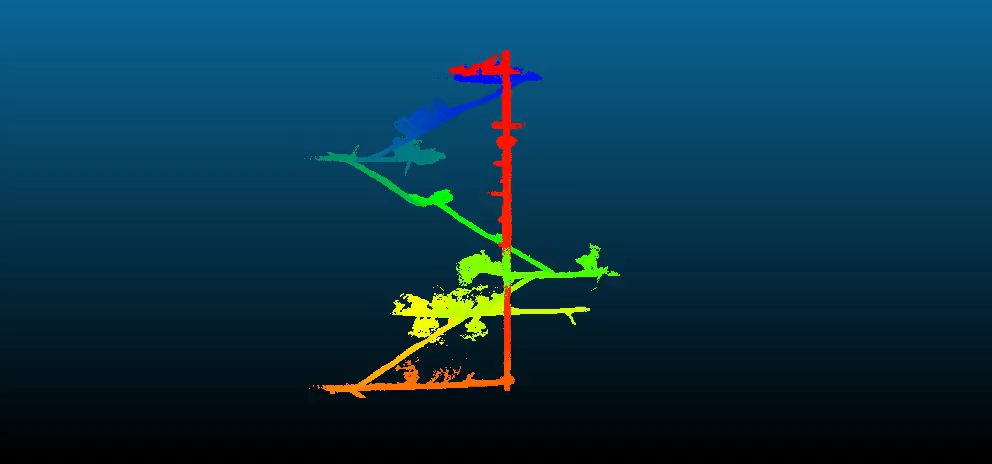
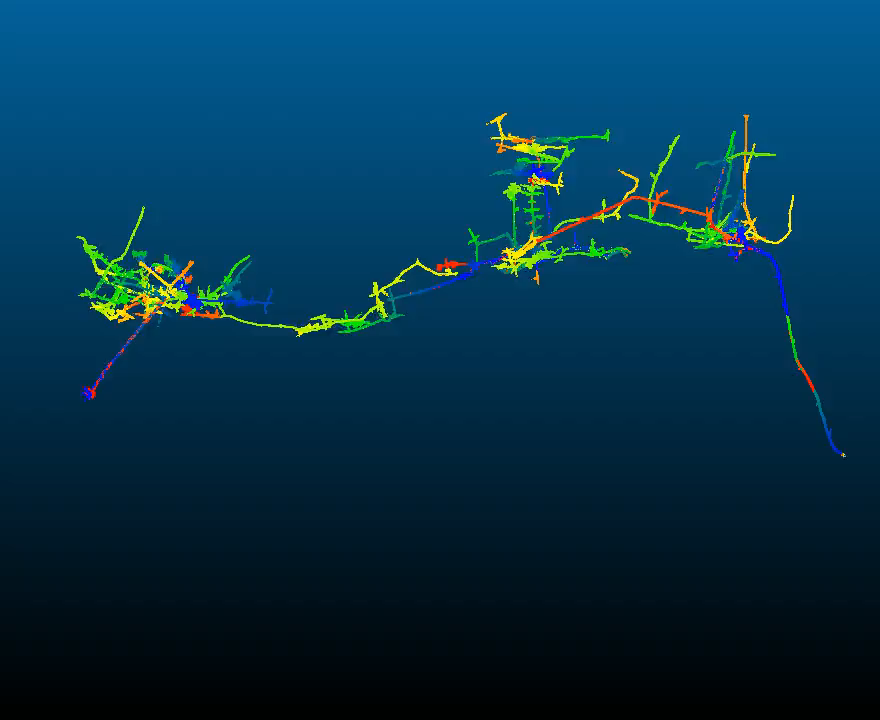
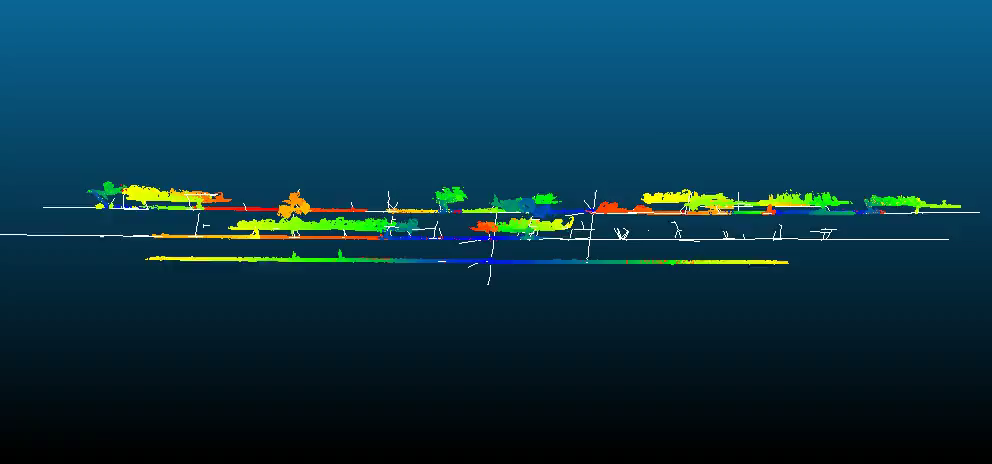
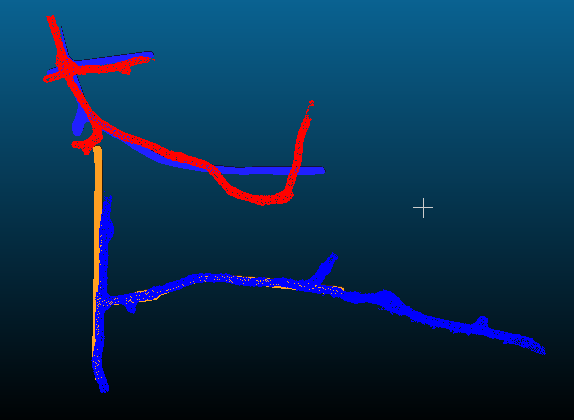
1.点云配准
如图所示,每一种颜色代表SLAM依次作业成果,由图可知,每一个工程数据都有几十米到上百米不等,并且是一个整体的数据,充分体现了SLAM数据实时处理的功能,对于多个工程的数据成果,使用RealWorks软件的点云自动配准功能,将SLAM多个工程数据统一配准整合一起,对单次扫描的结果进行抽稀、降噪、剪切、平剖等多种处理后,再将多次测量结果进行拼接,最终得到地下矿山整体空间三维数据。
点云配准1
点云配准2
配准完成后的点云
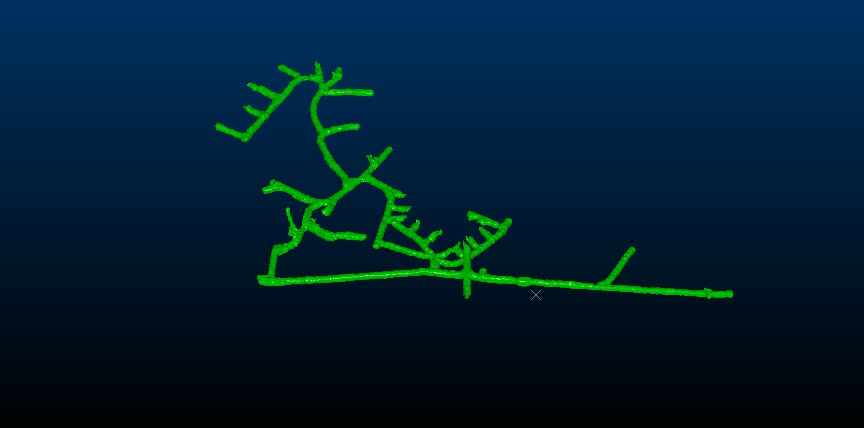
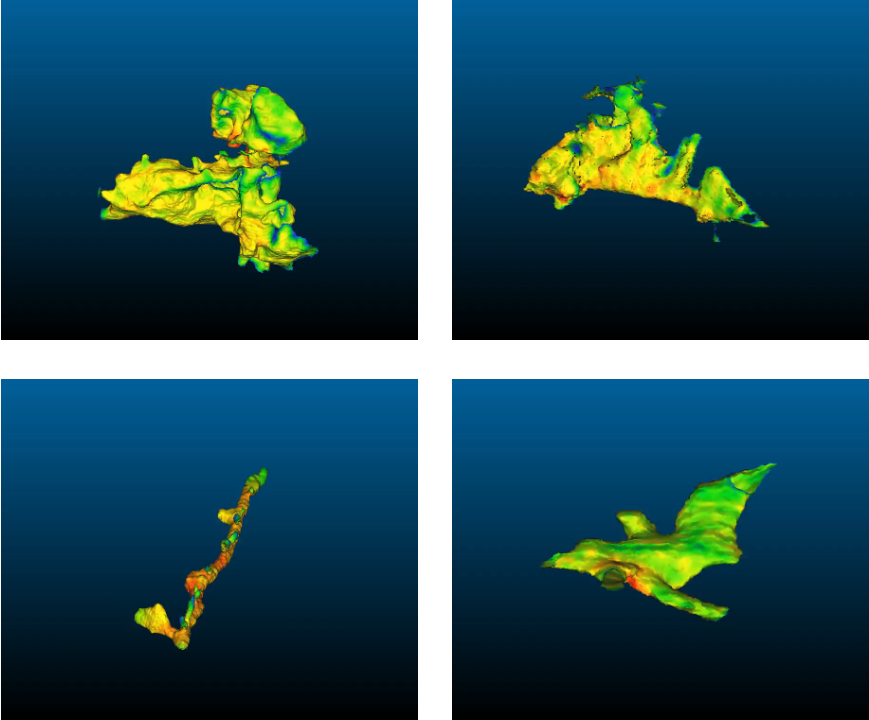
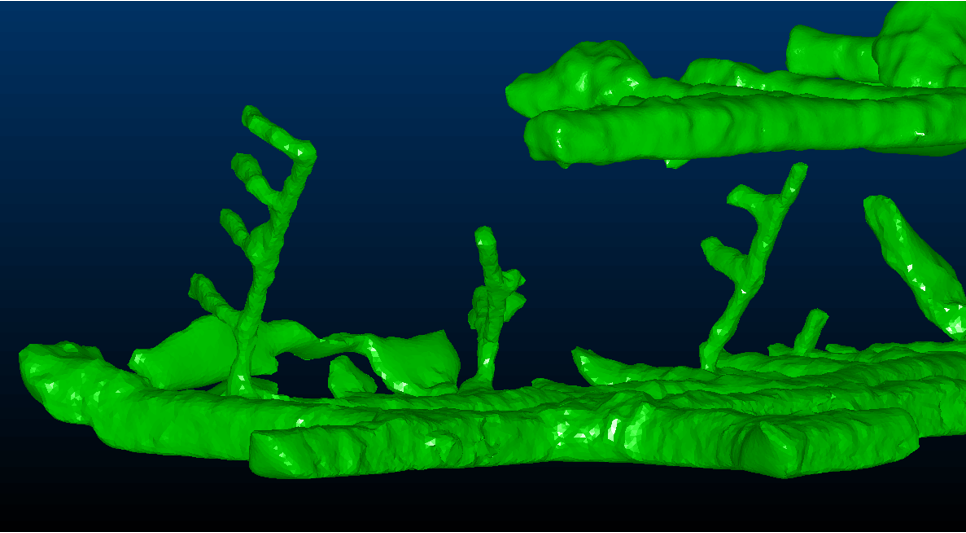
2.空区和采场建模
对空区及采场的点云进行建模后,结合矿山已开采情况,可辅助推测矿脉在地下的产状或延伸趋势,为后期巷道补钻找矿,巷道布置设计等提供依据。

矿山巷道逆向建模
3.目标提取
利用裁剪盒工具提取目标所在位置,更够更好的对残余煤堆进行单位分析。
4.残矿资源优化开采
通过对扫描的数据进行分析,对矿体边界进行合理的优化,发现矿井内部的残矿资源,以便更好的合理利用这些残矿资源。残矿产生的原因主要是实际开采中真实的矿体边界和原始模型有差异,根据实测数据,优化原模型边界。
残矿资源优化开采
优化后的效果
5.测量验方
通过实体模型,可在三维软件中快速测量并验方。数据来自于真实的三维空间扫描,更加贴合实际施工情况。

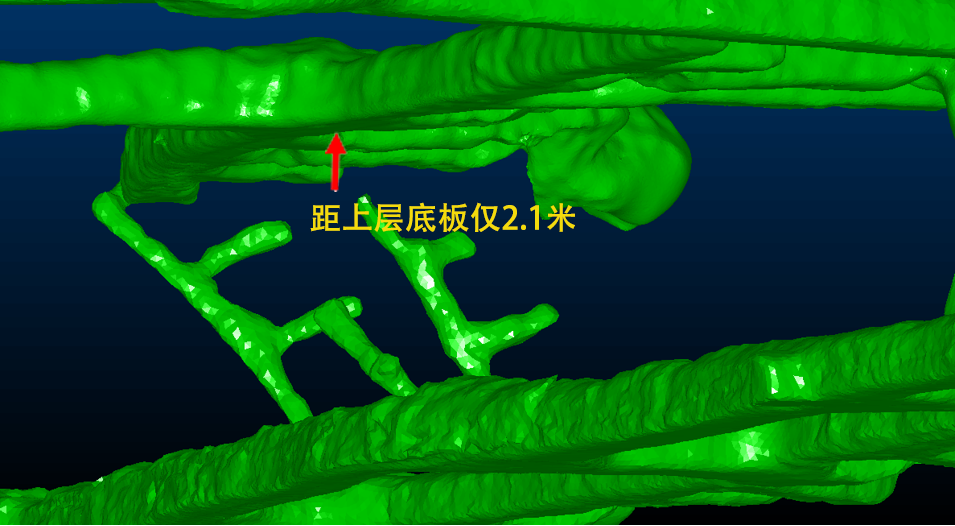
6.天井测量
20线天井经测量,已打通至495中段,即发现天井超挖。
内部天井结构
19.5b线天井经测量,其顶部已接近495中段底板,距离仅2.1米,形成安全隐患。
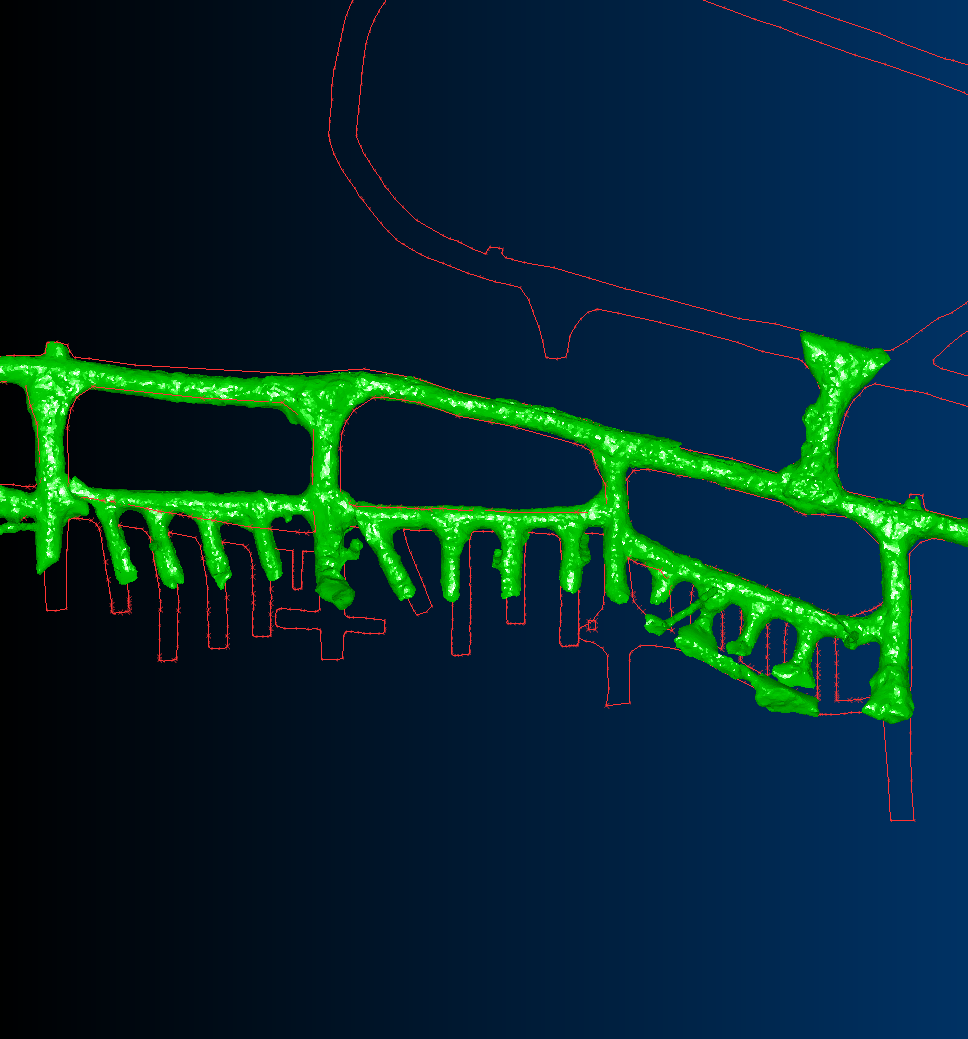
7.核对全站仪数据
495中段由全站仪放线测量,扫描仪生成数据与实测CAD吻合情况良好。
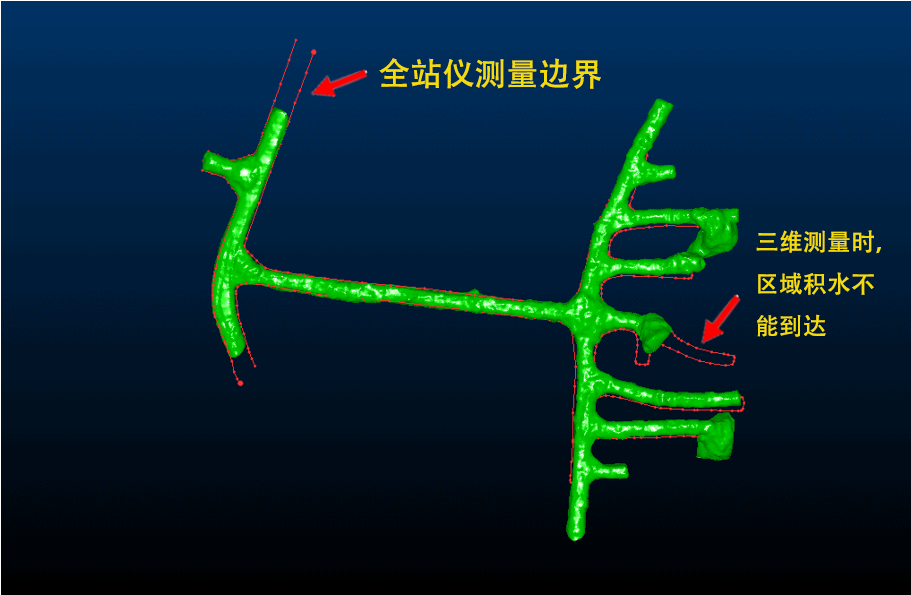
SLAM数据与CAD数据对比情况
470中段由全站仪放线测量的平巷与穿脉和三维测量所测数据吻合良好。由于部分出矿进路使用罗盘测量,该部分进路与三维测量数据吻合不佳,现场人员认为三维测量数据更接近实际。
罗盘测量与CAD数据对比情况
项目总结
本项目通过利用GEO-SLAM矿产巷道扫描作业,充分利用手持三维激光扫描技术,结合三维虚拟现实技术,在短时间之内完成了对狭窄的巷道扫描和局部区域的三维数据提取工作,并为后续矿山的开采和修复等工作提供了真实可靠的数据依据。GEO-SLAM,让地下空间扫描测量不再困难!!!




